
2026년 기술의 핵심, 피지컬 AI는 디지털 지능이 로봇의 몸을 빌려 현실 세계와 상호작용하는 기술입니다. 단순히 프로그래밍된 동작을 넘어, 센서로 환경을 인식하고 AI로 판단하여 물리적으로 행동하는 것이 핵심입니다. 이 기술은 인간의 언어를 이해하고 행동하는 VLA 기술과 하나의 모델로 다양한 작업을 수행하는 로보틱스 파운데이션 모델(RFM)의 등장으로 빠르게 발전하며, 노동력 부족과 같은 사회적 문제를 해결할 핵심 열쇠로 주목받고 있습니다.
목차
- 도대체 ‘피지컬 AI란’ 무엇인가?
- 피지컬 AI를 움직이는 두뇌와 감각 (핵심 기술)
- 2026년, 가장 주목해야 할 ‘피지컬 AI 기술 동향’
- 결론: 단순한 자동화를 넘어, 진정한 물리적 파트너로
- 자주 묻는 질문 (FAQ)
최신 피지컬 AI 기술은 챗GPT와 같은 생성형 AI가 디지털 정보의 패러다임을 바꾼 것을 넘어, 이제 인공지능이 물리적 세계와 직접 상호작용하는 새로운 시대의 서막을 열고 있습니다. 2026년은 AI 기술의 논의가 ‘무엇이 가능한가(Possibility)’에서 ‘어떻게 현실에서 작동하는가(Actuality)’로 이동하는 중요한 전환점입니다. 이는 단순히 프로그래밍된 동작을 반복하는 로봇을 넘어, 환경을 스스로 인식하고 판단하여 움직이는 진정한 의미의 지능형 기계가 등장했음을 의미합니다.
과거의 로봇이 정해진 규칙에 따라 움직이는 자동화 기계였다면, 이제는 보고, 듣고, 생각하며 실제 환경에 적응하는 능동적인 존재로 진화하고 있는 것입니다. 이 글을 통해 피지컬 AI란 무엇인지, 어떤 핵심 기술로 움직이는지, 그리고 CES 2026을 통해 살펴본 가장 뜨거운 피지컬 AI 기술 동향과 VLA 기술과 같은 최신 트렌드까지, 미래를 주도할 이 기술의 모든 것을 완벽하게 이해할 수 있을 것입니다.
도대체 ‘피지컬 AI란’ 무엇인가?
피지컬 AI란? 명확한 개념 정의
피지컬 AI란 인공지능이 카메라, 라이다(LiDAR)와 같은 센서를 통해 물리적 세계의 데이터를 수집하고, 그 정보를 해석하여 실제 환경에서 로봇 팔을 움직이거나 자율주행차를 운행하는 등 특정 물리적 작업을 수행하거나 상호작용하는 기술을 의미합니다. 한마디로, 디지털 세상에 머물던 AI의 두뇌가 로봇이라는 신체를 얻어 현실 세계에서 직접 행동하는 기술이라고 할 수 있습니다. 이는 단순한 정보 처리를 넘어 실제적인 ‘노동’을 수행할 수 있게 되었다는 점에서 기존 AI와 근본적인 차이를 보입니다. 피지컬 AI의 핵심은 가상 세계의 분석 결과를 현실의 움직임으로 정확하게 연결하는 능력에 있습니다.
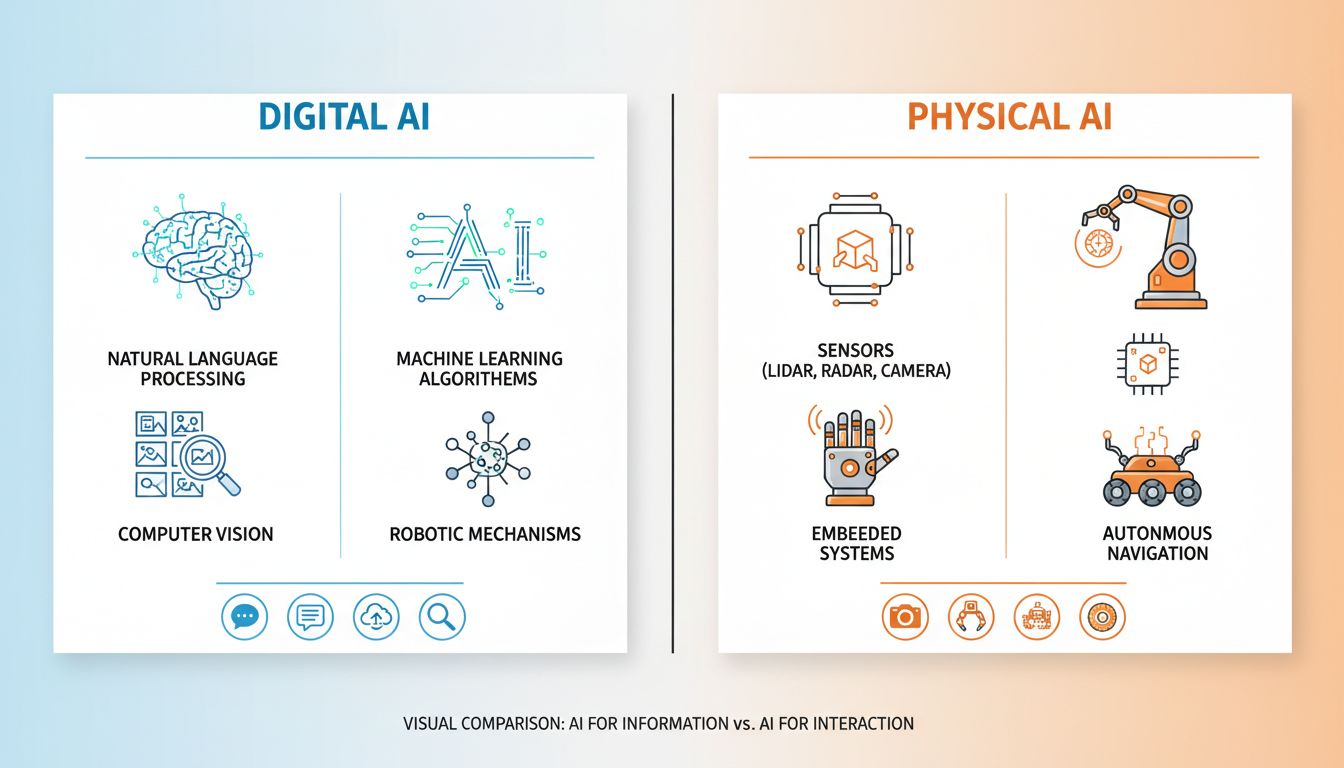
디지털 AI vs 피지컬 AI: 핵심 차이점 비교
우리가 흔히 접하는 챗GPT와 같은 디지털 AI와 피지컬 AI는 기반 모델과 작동 환경에서 뚜렷한 차이를 보입니다. 디지털 AI가 언어와 이미지를 다루는 ‘지식 중심’이라면, 피지컬 AI는 현실 세계의 상호작용을 다루는 ‘행동 중심’의 AI입니다.
| 구분 | 디지털 AI (예: 챗GPT) | 피지컬 AI (예: 자율주행 로봇) |
|---|---|---|
| 기반 모델 | 거대 언어 모델 (LLM) | 행동 중심 AI 모델 (Action-centric AI) |
| 주요 데이터 | 텍스트, 이미지 등 디지털 데이터 | 센서를 통해 수집한 현실 세계 데이터 |
| 작동 공간 | 가상 세계 (디지털 공간) | 물리적 세계 (현실 공간) |
| 핵심 기능 | 정보 생성, 요약, 번역 등 지식 처리 | 물체 조작, 이동, 환경 탐색 등 물리적 행동 |
피지컬 AI의 작동 원리: 인식 → 판단 → 행동
피지컬 AI의 모든 움직임은 ‘인식(Perception) → 판단(Decision) → 행동(Action)’이라는 세 단계의 순환 고리를 통해 이루어집니다. 이는 마치 사람이 눈으로 보고, 뇌로 생각한 뒤, 손과 발을 움직이는 과정과 매우 흡사합니다.
- 인식 (Perception): 카메라, 라이다, 레이다 등 다양한 피지컬 AI 센서를 통해 주변 환경 데이터를 수집합니다. 사람, 장애물, 도로, 사물의 형태와 거리 등 현실 세계의 정보를 디지털 신호로 변환하는 단계입니다.
- 판단 (Decision): AI 두뇌(모델)가 수집된 데이터를 실시간으로 분석하고 해석합니다. “저 앞에 있는 공을 집어야겠다” 또는 “장애물을 왼쪽으로 피해야겠다”와 같이 목표 달성을 위한 최적의 행동 계획을 수립합니다.
- 행동 (Action): 판단 단계에서 결정된 명령을 모터나 액추에이터(Actuator) 등 구동 장치에 전달하여 로봇 팔, 바퀴 등을 움직여 실제 물리적인 동작을 수행합니다.
피지컬 AI의 핵심 구성 요소
중요한 점은 피지컬 AI가 단순히 뛰어난 AI 모델 하나만으로 완성되지 않는다는 것입니다. 이는 네 가지 핵심 요소가 유기적으로 결합된 복잡한 시스템입니다. ①현실 세계 데이터를 수집하는 ‘피지컬 AI 센서’, ②수집된 정보를 바탕으로 최적의 명령을 내리는 ‘AI 기반 모델’, ③지연 없는 데이터 전송을 위한 ‘네트워크’, ④그리고 AI의 명령을 실제 움직임으로 구현하는 ‘액추에이터(Actuator)’가 모두 통합되어야 비로소 진정한 피지컬 AI 시스템이 완성됩니다. 이 요소들 간의 정밀한 협응 능력이 피지컬 AI의 성능을 좌우하는 핵심입니다.
피지컬 AI를 움직이는 두뇌와 감각 (핵심 기술)
피지컬 AI가 실제 세상에서 정교하게 움직이기 위해서는 인간의 감각기관처럼 세상을 인식하는 ‘센서’와, 뇌처럼 스스로 생각하고 결정하는 ‘자율 판단 기술’이 필수적입니다. 이 두 가지 핵심 기술이 어떻게 피지컬 AI에 생명을 불어넣는지 자세히 살펴보겠습니다.
A. 세상을 인식하는 오감: ‘피지컬 AI 센서’ 기술
피지컬 AI 센서 기술의 발전은 AI가 ‘정밀한 환경 인식과 반복 가능한 동작 수행’을 할 수 있게 만든 가장 중요한 물리적 기반입니다. 센서는 인간의 눈, 코, 귀, 피부처럼 AI에게 주변 상황에 대한 구체적인 정보를 실시간으로 제공하는 핵심적인 역할을 합니다. 다양한 센서 기술의 융합은 AI가 인간보다 더 정확하고 넓은 범위의 감각을 갖게 해줍니다. 예를 들어, 어두운 곳에서도 사물을 보거나, 전파를 이용해 악천후를 꿰뚫어 보는 능력은 순전히 센서 기술 덕분입니다.
주요 센서 종류와 역할
- 카메라 (Vision): 사람의 ‘눈’과 같은 역할을 합니다. 고해상도 이미지를 통해 사람, 사물 등 다양한 객체를 시각적으로 인식하고, 장면의 맥락을 이해하는 데 사용됩니다.
- 라이다 (LiDAR): 레이저 펄스를 발사하고 돌아오는 시간을 측정하여 주변 환경을 3D 형태로 정밀하게 스캔합니다. 밀리미터 단위의 정확도로 거리를 측정할 수 있어 자율주행차나 로봇의 지도 생성 및 장애물 회피에 필수적입니다.
- 레이다 (Radar): 전파를 이용하여 물체의 거리, 속도, 방향을 탐지합니다. 빛을 사용하는 카메라나 라이다와 달리 비, 안개, 눈과 같은 악천후 속에서도 안정적으로 객체를 탐지할 수 있는 장점이 있습니다.
- IMU (관성 측정 장치): 가속도 센서와 자이로스코프 센서를 결합하여 로봇이나 기계의 가속도, 회전, 방향 변화를 감지합니다. 이를 통해 자신의 움직임 상태를 정확히 파악하고 균형을 잡거나 정밀한 자세 제어를 할 수 있습니다.
센서 퓨전 (Sensor Fusion)
최신 피지컬 AI 기술은 한 가지 센서에만 의존하지 않습니다. ‘센서 퓨전’ 기술은 카메라, 라이다, 레이다 등 여러 종류의 센서에서 들어오는 정보를 하나로 융합하여 단일 센서가 가진 한계(예: 카메라는 어둠에 약하고, 레이다는 형태 인식이 부정확함)를 극복합니다. 인간이 눈으로 보고 귀로 들으며 피부로 느끼는 정보를 종합해 상황을 판단하듯, 센서 퓨전을 통해 AI는 훨씬 더 정확하고 풍부한 상황 인지 능력을 갖추게 됩니다.
B. 스스로 생각하고 결정하는 뇌: ‘자율 판단 기술’
센서를 통해 세상의 정보를 읽었다면, 이제 그 의미를 해석하고 어떻게 행동할지 결정해야 합니다. 자율 판단 기술은 센서로 수집된 방대한 데이터를 AI가 실시간으로 처리 및 해석하여, 주어진 목표를 달성하기 위한 최적의 행동을 스스로 결정하는 기술입니다. 이는 피지컬 AI의 ‘뇌’에 해당하는 핵심 기능으로, 단순한 자동화를 넘어 진정한 지능형 기계를 만드는 기반이 됩니다. 이 기술 덕분에 로봇은 예측하지 못한 상황에서도 유연하게 대처할 수 있습니다.
자율 판단 기술의 주요 기반 기술
- 기계학습·강화학습: AI는 수많은 실제 데이터와 가상 시뮬레이션 환경 속에서 수없이 많은 시행착오를 겪으며 특정 작업을 가장 효율적이고 안전하게 수행하는 방법을 스스로 학습합니다. 마치 아기가 걸음마를 배우듯, 성공적인 행동에는 보상을, 실패한 행동에는 벌칙을 주는 강화학습을 통해 로봇의 동작은 점차 최적화됩니다.
- 엣지 AI (Edge AI): 모든 데이터를 멀리 떨어진 중앙 서버(클라우드)로 보내지 않고, 로봇이나 기기 자체(Edge)에 내장된 고성능 칩에서 즉시 데이터를 처리하는 기술입니다. 0.1초의 지연도 치명적인 사고로 이어질 수 있는 자율주행차나 사람과 함께 일하는 협동로봇의 실시간 반응 속도와 안전성을 확보하는 데 필수적입니다.
- 시뮬레이션 기술: 실제 로봇이나 자동차를 수백만 번씩 움직여 테스트하는 것은 시간과 비용, 안전 측면에서 비효율적입니다. 시뮬레이션 기술은 현실과 똑같은 가상 환경을 만들어 그 안에서 AI 모델을 수백만, 수천만 번 테스트하고 학습시킵니다. 이를 통해 개발 비용과 시간을 획기적으로 절감하고, 현실에서 발생할 수 있는 위험을 최소화할 수 있습니다.
2026년, 가장 주목해야 할 ‘피지컬 AI 기술 동향’
2026년 현재, 피지컬 AI는 연구실을 넘어 산업 현장과 우리 일상으로 빠르게 스며들고 있습니다. 특히 인간과 더 자연스럽게 소통하고, 더 범용적인 능력을 갖추는 방향으로 기술이 진화하고 있습니다. 최신 연구와 산업 사례를 통해 가장 뜨거운 피지컬 AI 기술 동향을 살펴보겠습니다.
A. 보고, 이해하고, 즉시 행동하는 AI: ‘VLA 기술’의 부상
VLA 기술 (Vision-Language-Action)은 시각 정보(Vision)와 인간의 언어(Language) 명령을 함께 이해하여, 로봇이 구체적인 행동(Action)을 수행하게 하는 차세대 기술입니다. 과거에는 로봇을 움직이려면 복잡한 코딩이나 정해진 버튼 조작이 필요했지만, VLA 기술은 이러한 경계를 허물고 있습니다. VLA 기술의 발전으로 인간과 로봇이 마치 사람과 대화하듯 직관적으로 소통하고 협업하는 시대가 열리고 있습니다.
가장 대표적인 예로, “테이블 위에 있는 차가운 콜라캔을 나에게 가져다줘”라는 명령을 상상해볼 수 있습니다. VLA 모델이 탑재된 로봇은 먼저 카메라(Vision)로 테이블 위의 여러 물체를 인식합니다. 동시에 “차가운 콜라캔”이라는 언어(Language) 명령을 분석하여 자신이 본 물체들 중 목표물을 정확히 식별합니다. 마지막으로, 로봇 팔을 어떻게 뻗고, 어떤 힘으로 캔을 집어, 어디로 전달해야 하는지 일련의 행동(Action)을 스스로 계획하고 실행합니다. Google의 RT-2나 테슬라의 옵티머스 2세대가 보여준 것처럼, 이제 로봇은 추상적인 명령을 이해하고 복잡한 다단계 작업을 수행하는 수준에 이르렀습니다.
B. 산업 현장의 혁신: CES 2026에서 확인된 피지컬 AI
매년 최신 기술의 향연이 펼쳐지는 CES에서도 피지컬 AI는 단연 핵심 트렌드로 자리 잡았습니다. 특히 CES 2026에서는 두산로보틱스와 두산밥캣이 선보인 AI 기반 스마트 건설 솔루션이 큰 주목을 받았습니다. 이들은 자율주행 로봇과 AI가 탑재된 건설 장비가 서로 연동하여 작업하는 미래 건설 현장의 모습을 현실적으로 보여주었습니다. 예를 들어, 굴삭기가 사람의 조종 없이 스스로 땅을 파고 자재를 옮기며, 자율이동로봇(AMR)이 필요한 공구를 작업자에게 배달하는 식입니다. 이는 위험하고 힘든 건설 현장에서 작업자의 안전을 획기적으로 확보하고, 동시에 24시간 작업 수행을 통해 생산성을 극대화하는 피지컬 AI 기술의 대표적인 산업 적용 사례로 평가받습니다.
C. 로보틱스 파운데이션 모델(RFM)의 등장
새로운 패러다임인 ‘로보틱스 파운데이션 모델(Robotics Foundation Model, RFM)’의 등장은 피지컬 AI 기술 동향에서 가장 주목할 만한 변화 중 하나입니다. 기존의 로봇 AI는 특정 작업, 예를 들어 용접이나 부품 조립 등 한 가지 임무만 잘하도록 훈련되었습니다. 하지만 RFM은 다양한 종류의 로봇 데이터(움직임, 센서 값, 작업 환경 등)를 거대한 모델에 미리 학습시켜, 여러 기술을 조합하고 처음 보는 낯선 작업에도 유연하게 대응할 수 있는 범용 로봇 지능을 지향합니다. Google DeepMind의 RT-2나 Covariant의 ‘Covariant Brain’과 같은 모델들이 대표적입니다. 이는 마치 하나의 로봇이 요리, 청소, 조립 등 여러 작업을 수행할 수 있는 ‘만능 로봇’의 등장을 예고하는 중요한 기술적 진보입니다.
결론: 단순한 자동화를 넘어, 진정한 물리적 파트너로
지금까지 살펴본 것처럼, 피지컬 AI 기술은 ‘인식-판단-행동’이라는 명확한 개념과 이를 뒷받침하는 핵심 기술(피지컬 AI 센서, 자율 판단 기술)을 바탕으로, VLA 기술 및 로보틱스 파운데이션 모델과 같은 혁신을 통해 빠르게 현실 세계로 확장되고 있습니다. 이러한 발전은 단순한 기술적 호기심을 넘어, 우리 사회가 직면한 거대한 변화에 대응하기 위한 필수적인 해결책으로 부상하고 있습니다.
피지컬 AI의 부상 뒤에는 전 세계적인 노동력 부족, 안정적인 공급망 확보, 지속가능성이라는 3대 메가트렌드가 자리 잡고 있습니다. 고령화로 인한 생산 인구 감소, 지정학적 리스크로 인한 글로벌 공급망의 불안정성, 그리고 ESG 경영 강화라는 시대적 요구에 대응하기 위해, 피지컬 AI는 더 이상 선택이 아닌 필수가 되어가고 있습니다.
미래에 피지컬 AI는 단순히 인간의 노동력을 대체하는 기계를 넘어, 위험하고 힘들고 반복적인 작업을 대신 수행함으로써 인간이 더 창의적이고 가치 있는 일에 집중할 수 있도록 돕는 ‘물리적 파트너(Physical Partner)’로 진화할 것입니다. 인간의 지능과 능력을 물리적으로 확장시켜주는 든든한 동반자가 되는 것입니다.
물론, 이 기술이 우리 사회에 완전히 정착하기까지는 높은 초기 도입 비용, 데이터 보안 문제, 그리고 인간과의 안전한 상호작용을 위한 신뢰성 확보 등 앞으로 해결해야 할 과제도 남아있습니다. 하지만 분명한 것은, 최신 피지컬 AI 기술 동향을 이해하고 준비하는 것이 다가올 미래의 산업과 사회 변화에 현명하게 대비하는 가장 확실한 첫걸음이라는 사실입니다. 피지컬 AI가 만들어갈 새로운 현실은 이미 시작되었습니다.
자주 묻는 질문 (FAQ)
Q1. 피지컬 AI가 챗GPT와 같은 디지털 AI와 가장 다른 점은 무엇인가요?
A. 가장 큰 차이점은 ‘작동 공간’과 ‘핵심 기능’에 있습니다. 디지털 AI는 텍스트나 이미지 같은 디지털 데이터를 다루며 가상 공간에서 작동하지만, 피지컬 AI는 센서를 통해 현실 세계의 데이터를 수집하고 로봇의 몸을 움직여 물리적인 작업을 수행합니다. 즉, 디지털 AI가 ‘지식’을 다룬다면 피지컬 AI는 ‘행동’을 다루는 기술입니다.
Q2. VLA(Vision-Language-Action) 기술이 왜 중요한가요?
A. VLA 기술은 인간과 로봇의 소통 방식을 획기적으로 바꾸기 때문에 중요합니다. 과거에는 복잡한 프로그래밍 코드로 로봇에 명령을 내려야 했지만, VLA 기술을 통해 사람은 “저기 있는 빨간 공을 가져다줘”와 같이 일상적인 언어로 명령할 수 있습니다. 로봇은 이 말을 듣고(Language), 눈으로 보고(Vision), 스스로 판단하여 행동(Action)하기 때문에 훨씬 더 직관적이고 유연한 협업이 가능해집니다.
Q3. 피지컬 AI 기술이 앞으로 해결해야 할 과제는 무엇이 있나요?
A. 피지컬 AI가 널리 보급되기 위해서는 몇 가지 과제가 남아있습니다. 첫째, 로봇과 센서 등 하드웨어의 높은 초기 도입 비용 문제입니다. 둘째, 로봇이 수집하는 방대한 현실 세계 데이터의 보안 및 프라이버시 문제입니다. 마지막으로, 예측 불가능한 환경에서 인간과 함께 안전하게 작동할 수 있는 높은 수준의 신뢰성과 안전성을 확보하는 것이 중요한 기술적 과제입니다.